It's a pleasure to meet you. My name is
Jonathan Siskind
Mechanical Engineering
Student at Stanford University
- jsiskind@stanford.edu
- 765-412-9156

Deep down, I'm a Maker.
I’ve always thought that engineers have a unique superpower – the ability to make anything. A driven engineer with the right skillset and just enough patience can create anything their mind can dream of.
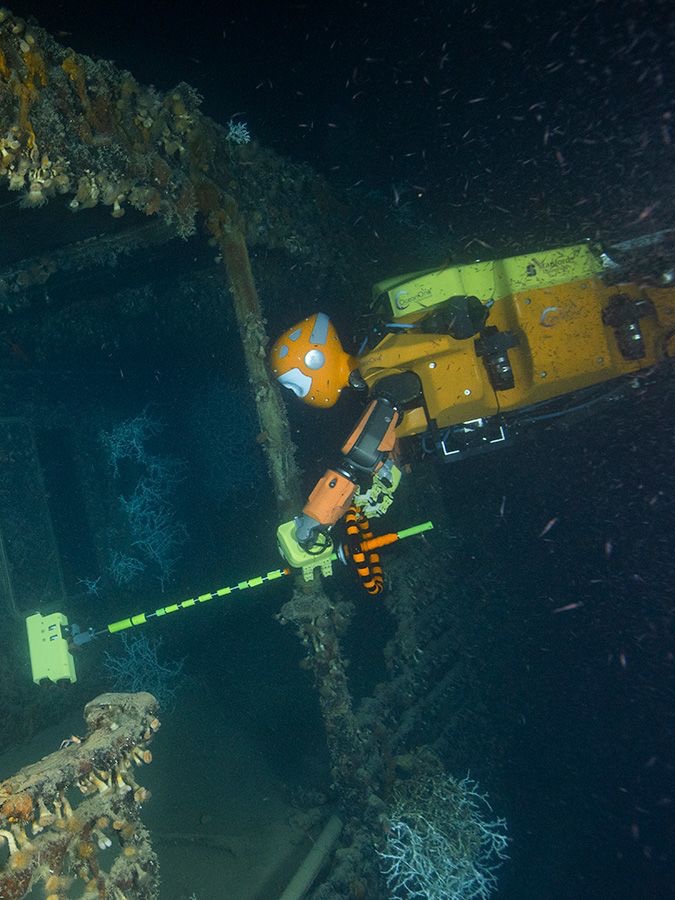
Over the past five years, I have pursued a multitude of projects to hone my engineering skillset. In my basement workshop in my home state of Indiana, I’ve built creations ranging from a wrist-mounted flamethrower out of spare pipe fittings to a meter-long remote-controlled submarine. At Stanford Space Initiative, I am leading a team to construct a solar-powered, GPS-navigated rover to autonomously make an ambitious trek across the continent of Antarctica. As the only undergraduate student in the Stanford Robotics lab, I’ve been developing an underwater handheld camera to be used by the humanoid exploration robot Ocean One K. This project-based experience is what sets me apart. First and foremost, I seek to apply my creative abilities to each and every one of these projects – and all this expertise has crafted me into an adept problem solver along the way.
Technical Skills
Mechanical
Computer-Aided Design (Onshape, Fusion 360)
3D Printing (including Enders, Prusas, Formlabs, both FDM/SLA)
Workshop/Power Tools
electrical
Microcontrollers: Arduino, Raspberry Pi, Mango Pi, dozens of different programmable peripherals (sensors, actuators, etc)
Precise Soldering
software
Python, C, C++, MATLAB
RISC-V, Assembly
Software Dev Tools: Unix, Git, GDB, Minicom Serial
theoretical
Robot Control Theory, Robotic Kinematics/Dyanmics
Multivariate Calculus, ODEs, PDEs
Thermodynamics, Fluid Mechanics
My Experience
Jan 2023 - Present
Stanford Robotics Lab
Undergraduate Research
I conducted robotics research to integrate timed controls, an OLED screen, lens distortion correction, buoyancy leveling, and a live feed system to the Raspberry Pi-controlled handheld camera operated by Ocean One K, an underwater exploration robot.
Oct 2022 - Present
Stanford Student Space Initiative
rover Team co-lead
I led the Mars division of the highest-funded engineering student organization/club at Stanford; I managed my subteam's 40 students and $20,000 annual budget. I am leading the development of a solar-powered, GPS-navigated rover that will autonomously drive through Antarctica to the South Pole.
Aug 2019 -
July 2022
FIRST Robotics Competition
vice president
I led the tech/design team to construct several 100+ lb. robots that participated in dozens of competitions. Furthermore, I administered community engineering outreach programs to hundreds of local youth.