Milling Around: A Demonstration of the Geneva Mechanism
Objective Summary
For my Foundations of Product Realization class: design a machine that can move wooden blocks a distance of at least 18 inches horizontally and 8 inches vertically using a unique mechanism. At the end, all the machines were to be lined up to pass said wooden blocks from one end to the other, similar to a Rube Goldberg machine.
Further Background
As you might be able to tell, the project constraints were quite open-ended. Thus, I personally decided to “go big or go home” – I desired to make a machine that would stand out among the rest, almost like the London Eye amidst the River Thames. I decided to find a mechanism that could generate intermittent rotational motion, similar to the ticking second hand on a watch face, to move wooden blocks across a watermill-like path. To help my machine stand out from the rest of the class, I also knew that I wanted to motorize it.
Process
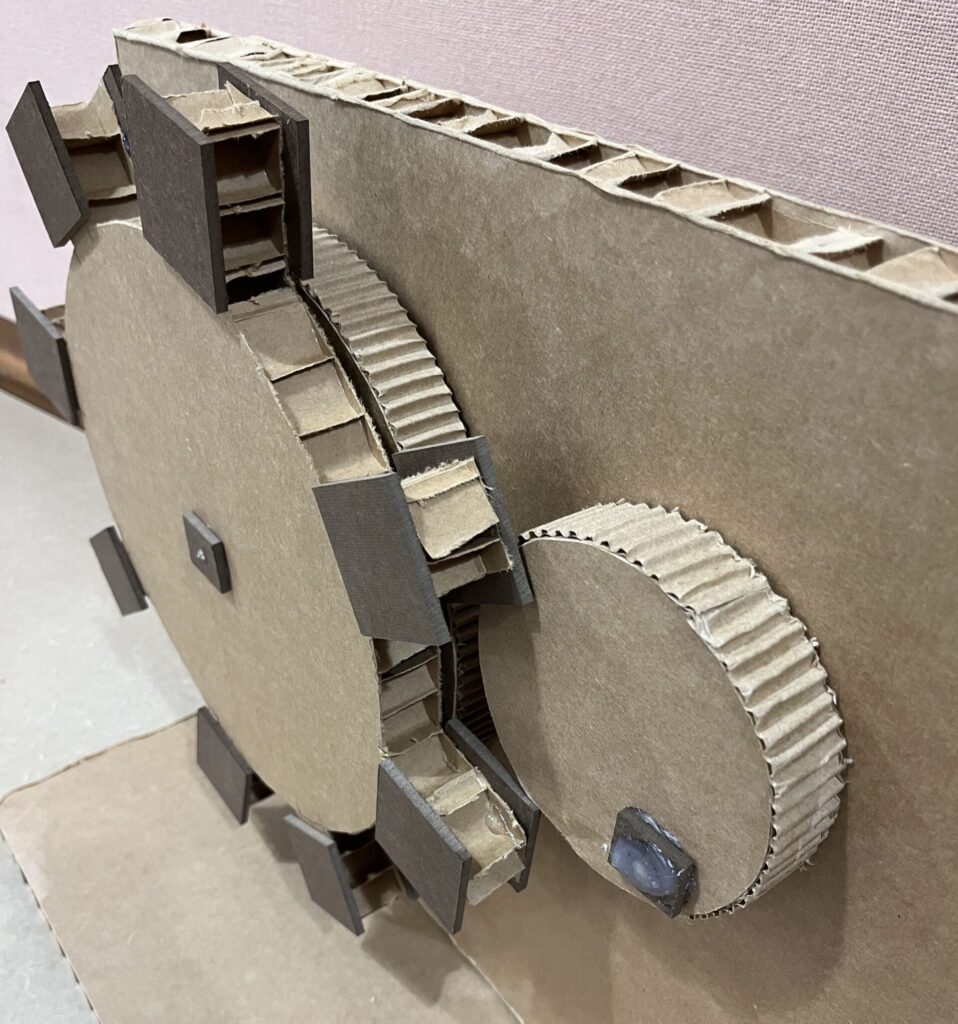
My first idea to generate intermittent rotational motion was to use offset gears. I got this idea from the Brick Experiment Channel on Youtube, as shown to the right. The driver gear has an off-center axis so that its center rotates around a circular path. Once that path meshes with the driven gear, the assembly attached to the driven gear completes a fraction of a rotation.
As per class instructions, I constructed a cardboard prototype of a simple machine using this mechanism. This prototype demonstrated that an offset gear mechanism would not be effective at generating the desired intermittent rotational motion, as there was slippage between the gears when they were not in contact. The assembly attached to the driven gear would be free to move when the gears were not meshed, which resulted in imprecise motion.
Instead, I pivoted to the geneva drive mechanism. This clever mechanism is used to generate intermittent rotational motion in plenty of real world applications, such as in the second hand of a mechanical watch or in the rotating tool changer of a CNC mill. Its unique geometry also prevents it from running into the same issue that the offset gears had.
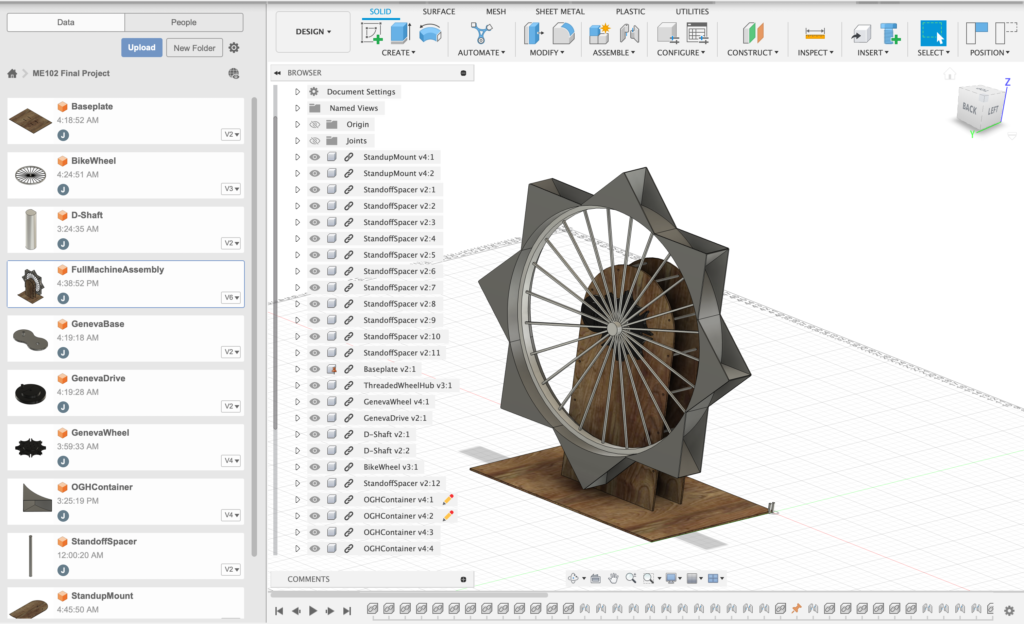
I planned to use a spare bicycle wheel as the centerpiece of this machine; the wheel would mount to the driven gear of the Geneva mechanism. I would mount plastic carriages across the circumference of the wheel to carry the wooden blocks across the path. Everything would be mounted to a duron frame held together by a bunch of fasteners.
I subsequently modeled the entire machine in Fusion 360.
Next came the assembly of the machine. Duron parts were laser cut, 16 plastic carriages were printed out of PLA, and a bunch of metal fasteners were gathered. Assembly took far longer than I expected, – maybe 20-30 hours total, due to some of the challenges explained below.
Some challenges I ran into:
The machine was very front heavy and cantilevered forwards. I screwed a large wooden 2×4 block into the back to offset this cantilevering.
Stanford’s Product Realization Lab did not have a proper shaft coupler adapter that could fix the motor shaft to the 0.25’ D-Shaft that drove the geneva mechanism. I first tried to 3D print a custom shaft coupler adapter. That worked for a little bit; but it eventually failed due to mechanical strain. I subsequently ordered a proper metal coupler adapter online that solved the issue.
A 3D printed peg on the geneva driver gear snapped off due to mechanical strain as well. I solved the issue by drilling a hole through the location of the peg and replacing it with a short aluminum rod. I then fixed the rod in place using a heat set insert and a set screw.
Because of the sheer amount of mass that the machine had to rotate, it generated a huge amount of angular momentum that would cause the Geneva driver gear to slam into the driven gear every “click”, and it would bounce back a bit (similar to gear backlash). I resolved this issue by slightly enlarging the driver gear so that it would fit snugly into the driven gear, leaving minimal room for any bounce back.
I am quite satisfied with the resulting machine. It ended up being the only motorized machine in the entire class! See the videos below: